5.3. Velocity Motion Model
이 글은 Sebastian thrun의 Probabilistic Robotics를 보고 내용을 정리한 글이며, 나름 쉽게 표현하기 위해서 의역을 한 부분이 있습니다.
운동학 구성(Kinematic Configuration)
운동학(Kinematics)은 로봇의 구성에서의 컨트롤 액션의 효과를 묘사하는 미적분입니다. 강체(rigid) 모바일 로봇의 구성(configuration)은 일반적으로 6개의 변수, 외부 프레임 좌표계에 대한 3차원 직교좌표계 및 3개의 오일러 각(roll, pitch, yaw)로 나타냅니다.
평면에서의 로봇의 자세(pose)는 그림 5.1에 나타내었습니다.

이는 외부 프레임 좌표계에 대해 각도 방향을 포함한 2차원 평면 좌표계로 구성됩니다. 평면 좌표는 $x$와 $y$로 나타내며(상태 변수 $x_t$와 헷갈리지 마세요), 각도는 $\theta$로 나타냅니다. 따라서 로봇의 pose는 다음과 같이 벡터 형태로 나타낼 수 있습니다.

로봇의 방향은 보통 bearing 또는 heading direction이라고 합니다. 그림 5.1에서, 만약 $\theta = 0$이면 로봇은 $x$축 방향을, $\theta = 0.5\pi$이면 $y$축 방향을 바라본다고 하겠습니다.
pose 값에서 방향값을 빼면 우리는 이 값을 위치(location)이라고 하며, 다음과 같이 $x-y$좌표계로 나타냅니다.

확률적 운동학(Probabilistic Kinematics)
확률적 kinematic model 또는 motion model은 모바일 로보틱스에서 상태 과도 모델의 역할을 합니다. 이 모델은 이전에 설명했던 익숙한 조건부 확률밀도로 다음과 같이 주어집니다.

여기서 $x_t$와 $x_{t-1}$은 로봇의 pose(단순히 $x$좌표값만을 의미하는게 아닙니다)이고, $u_t$는 운동 명령입니다. 이 모델은 로봇이 $x_{t-1}$에서의 운동 명령 $u_t$를 실행할 때 가정하는 kinematic state의 전체 사후 확률 분포를 묘사합니다. 때때로 $u_t$는 로봇의 오도메트리(odometry)로 주어지지만, 개념적인 이유에서 일단 $u_t$는 컨트롤이라고 하겠습니다.
그림 5.2는 평면 환경에서 움직이는 강체 모바일 로봇의 두 가지 kinematic 모델 예제를 보여줍니다. 두 경우 모두, 로봇의 초기 pose는 $x_{t-1}$입니다. 확률 분포 $p(x_t | u_t, x_{t-1})$은 어두운 영역으로 나타냈으며, 색이 더 어두울수록 더 높은 확률을 가집니다.

그림 5.2의 (a)에서, 로봇은 약간의 거리를 앞으로 움직이는 동안 그림에 나타냈듯이 회전 및 직선(translational error) 오차가 생깁니다. (b)는 더 복잡한 움직임을 하며, 이에 따라 더 넓게 퍼진 불확실성의 결과가 나왔습니다.
실제로, 오도메트리(odmetry)모델은 속도 모델보다 더 정확한 경향이 있는데, 대부분의 상업적 로봇은 로봇의 바퀴 회전을 측정하여 얻을 수 있는 정확도 수준으로 속도 명령을 실행하지 않기 때문입니다. 하지만, 오도메트리는 운동 명령이 실행되어야 계산 가능합니다. 따라서 이는 운동 계획(motion planning)에 사용될 수 없습니다. 장애물 회피같은 planning 알고리즘은 그 운동의 영향을 반드시 계산해야 합니다. 따라서, 오도메트리 모델은 일반적으로 추정에 적용되고, 속도 모델이 확률적 motion planning에 적용됩니다.
5.3. 속도 운동 모델(Velocity Motion Model)
velocity motion model은 우리가 로봇을 회전속도 및 선속도(translational velocity)를 통해 제어한다고 가정합니다. 시간 $t$에서의 선속도는 $v_t$라고 하고, 회전속도는 $w_t$라고 하겠습니다. 즉,

여기서 $v_t$는 로봇의 전방을 향해 움직일 때 +값의 속도를 가진다고 하고, $w_t$는 반시계방향으로 회전할 때 +값의 회전속도를 가진다고 하겠습니다.
1. Closed Form Calculation
table 5.1은 확률 $p(x_t | u_t, x_{t-1})$을 계산하기위한 알고리즘을 나타냅니다.
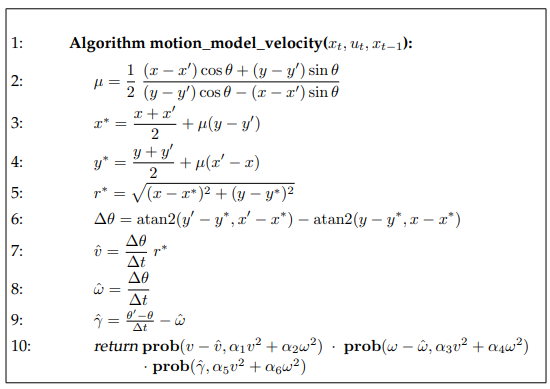
이 알고리즘은 초기 pose $x_{t-1} = (x\; y\; \theta)^T$와 컨트롤 $u_t = (v\; w)^T$를 입력으로 받고, 추측하는 pose를 $x_t = (x'\; y'\; \theta ')^T$로 나타냅니다. 출력값은 상태 $x_{t-1}$에서의 컨트롤 $u_t$를 실행한 후 $x_t$에서의 사후확률 $p(x_t | u_t, x_{t-1})$이며, 컨트롤은 고정된 duration $\Delta t$동안 수행됐다고 가정합니다. 파라미터 $\alpha _1$부터 $\alpha _6$은 robot-specific motion error 파라미터 입니다. 이 알고리즘은 먼저 오차가 없는 로봇의 컨트롤을 계산합니다. 이 파라미터들은 $\hat{v}, \hat{w}$로 주어집니다. 여기서 $\gamma$는 로봇이 목표지점에 도착한 후의 회전을 나타냅니다. 실제 상황에서 로봇이 목표지점으로 움직일 때, 로봇이 목표지점에 도착하는 목표 pose에서 방향$(\theta)$까지 정확하게 맞춰서 도착하지는 않고, 일단 해당 위치로 이동한 후에 제자리에서 회전하면서 pose를 맞추게 됩니다. $\gamma$는 이렇게 도착지점에 도착한 후의 회전을 말합니다.
여기서 함수 $\bf prob \it (x, b^2)$는 운동 오차를 모델링한 것입니다. 이것은 파라미터 $x$가 중심이 0이고 분산이 $b^2$인 확률분포를 계산합니다. 이를 적용한 정규분포 및 삼각분포는 table 5.2.에 나타냈습니다.
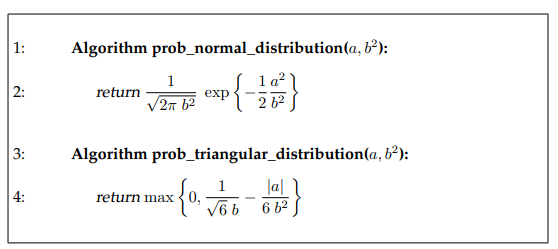
그림 5.3.은 $x-y$ 평면으로 사영된 velocity motion model의 예시를 보여줍니다.

그림 5.3.의 모든 경우에서 로봇은 같은 선속도와 회전속도로 운동하도록 설정하였습니다. 그림 5.3.의 (a)는 $\alpha _1$부터 $\alpha _6$까지의 오차 파라미터를 중간 크기로 설정한 경우입니다. (b)는 작은 회전 오차($\alpha _3, \alpha _4$)를 설정하였으나 큰 직선(translational error) 오차($\alpha _1, \alpha _2$)를 설정한 경우입니다. (c)는 회전 및 직선 오차를 모두 크게 설정한 경우의 결과입니다.
2. 샘플링 알고리즘(Sampling Algorithm)
파티클 필터는 임의의 $x_t, u_t, x_{t-1}$의 사후 확률을 계산하는 대신 motion model $p(x_t | u_t, x_{t-1})$으로부터 샘플링을 하기에 충분합니다. 조건분 확률 밀도로부터 샘플링을 하는것은 그 확률 밀도를 계산하는 것과는 다릅니다. 샘플링에서는, 우리는 $u_t$와 $x_{t-1}$이 주어지고, motion model $p(x_t | u_t, x_{t-1})$을 따라 그려진 랜덤한 $x_t$를 생성하려고 합니다. 확률 밀도를 계산할때는, 다른 평균을 통해 생성된 $x_t$ 또한 주어지며, 조건 $p(x_t | u_t, x_{t-1})$에서의 확률 $x_t$를 계산하려고 합니다.
table 5.3.에서의 sample_motion_model_velocity 알고리즘은 고정된 컨트롤 $u_t$와 pose $x_{t-1}$에 대한 $p(x_t | u_t, x_{t-1}$로부터 랜덤한 샘플을 생성합니다.

이 알고리즘은 $x_{t-1}$과 $u_t$를 입력으로 받고, 분포 $p(x_t | u_t, x_{t-1})$를 따르는 랜덤한 pose $x_t$를 생성합니다. line 2부터 4는 컨트롤 명령을 kinematic motion model에서 나온 오차 파라미터 노이즈를 추가하여 "교란(perturb)"합니다. 그리고 그 노이즈 값들은 line 5~7에서 새로운 pose를 생성하기 위해 사용됩니다. 따라서, 샘플링 과정은 가장 간단한 방법으로 그 예측에서의 컨트롤 노이즈를 포함하는 간단한 로봇 운동 모델을 구현합니다. 그림 5.4는 그 샘플링 루틴의 결과를 보여줍니다. 여기서 함수 $\bf sample \it (b^2)$는 평균이 0이고 분산 $b^2$으로부터 랜덤한 샘플을 생성합니다.

그림 5.4.의 샘플은 sample_motion_model_velocity 알고리즘에 의해 생성되었습니다.
많은 경우에서 주어진 확률 밀도 $x_t$를 계산하는 것 보다는 $x_t$를 샘플링 하는것이 더 쉽습니다. 왜냐하면 샘플들은 단지 물리적인 운동 모델의 forward simulation만을 요구하기 때문입니다. 오차 파라미터의 역추측(retro-guessing)에 해당하는 예측되는 pose의 확률을 계산하기 위해서는 물리적 운동 모델의 역(inverse)을 계산해야 합니다.